After enjoying so much our visit to UTIAS’s Dynamic System Lab on May, we start wondering if you could visit another of our professors from Udacity’s Flying Cars and Autonomous Flight. Luis Yu, Xinjie and I started to think about how to approach Nick Roy. The opportunity to visit MIT’s CSAIL Robust Robotics Group was too big to let it pass. We asked Udacity’s help by chatting with Aurina and Jake Lussier to reach out to the professor. I emailed him directly as well. Nick accepted our visit! We will be going to Boston!
Once we have confirmation on the visit date, Udacity help us to announce this on the FCND Slack channel and in this way anybody could go and enjoy this wonderful opportunity. The night before the event, Luis, Xinjie, Fernando Sadu and I met at the Quincy Market to start the celebration:
After an interesting conversation and a couple of beers, we settled to meet at The Glass House the next day to have brunch and walk to see the professor. At that time, Karthi Jeyabalan just arrived from Utah:

It was close to 12, and we need to get going. When we arrived at the Stata Center, we meet the rest of the group: Vishakha Goyal, Meghav Verna, Matiur Rahman and Hidayat Lioe. Here we are:

We wait for Nick to meet us, and the visit begins:
Prof. Nick introduced us to his group and the kind of research they are doing:
We find a sitting place and the room is open for questions. A lot of interesting topics were touched in this conversation, but I won’t even try to summarize them. It is better to hear them from the “source”:
The rangefinder mention on the video could be this model Hokuyo URG.
After this fascinating conversation, we moved to another room where we met Robotics Software Engineers Jake Ware and John Carter and the Ph.D. Candidate Kyel Ok for a short demonstration. The first video shows us entering the “testing” facility but ends before the drone starts:
In addition Jake’s presentation, the second video shows the drone flying and more details of the drone:
Here is a video of just the drone trajectory:
After this demo, we saw a video regarding some more aggressive trajectories on a rented parking garage, but sadly none of us has a video about that to share. Here is a picture where you can see the parking garage:

The last video was regarding an experiment outdoors. The drone has to find a red barrel that is somewhere ahead and come back. As John said in the video, the drone doesn’t know what it will encounter on the way. It has a Hokuyo laser range-finder and a monocle camera only:
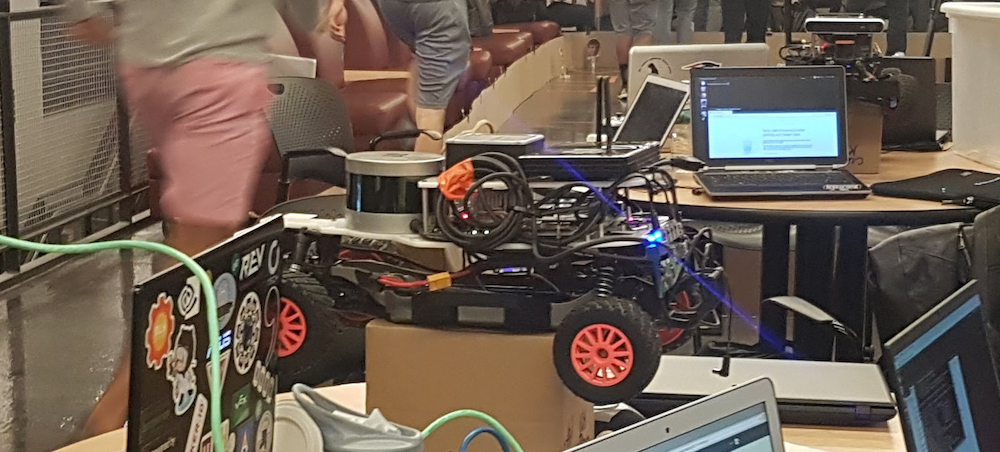
With that our demo was over, we thanks Jake, John, and Kyel for this beautiful presentation and Nick took us to join a tour of visitors to the facilities. During that tour, we enter a place where a workshop/course was taking place. It looks like a group of young students was building a self-driving mini-car!

Here is a detail of the model:
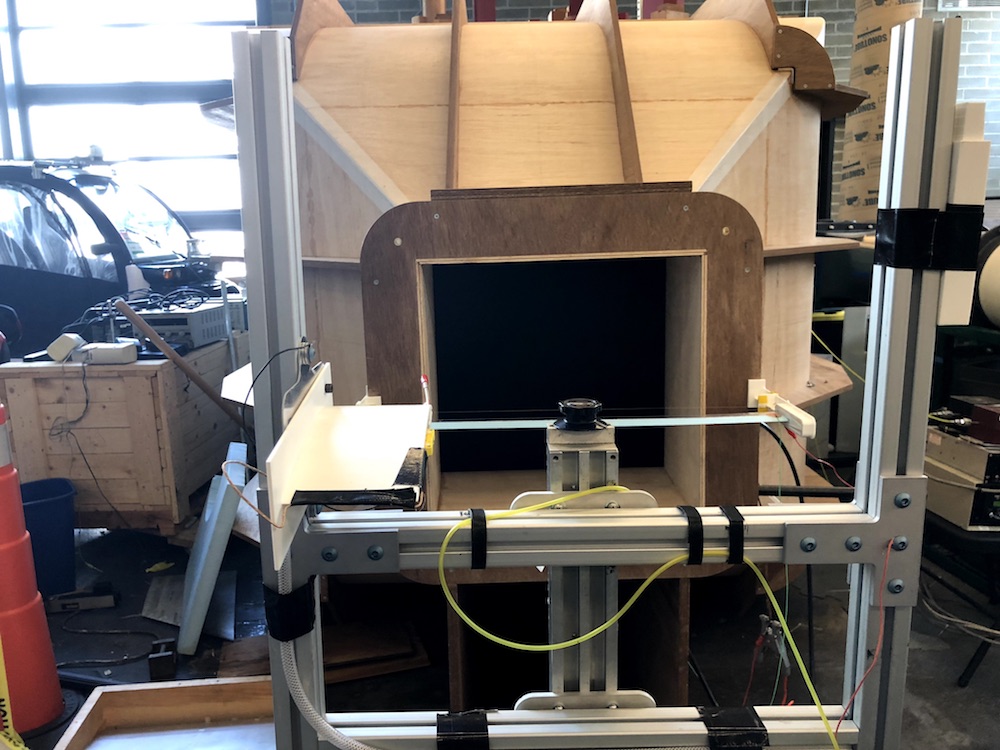
We have the opportunity to see a wind tunnel as well:
Vishakha and Meghav had to go earlier, but they enjoyed the first part of the tour with us. It was my pleasure to meet you guys. The tour last for a bit more than an hour, and we were starving by that time; so, we end up having lunch and more interesting conversations at a restaurant nearby:

Everything has to have an end, and this was all for this incredible visit. We split up after a while, but not without visiting a gift shop and have some coffee:
During our visit, we asked Prof. Nick for some references to read about the topics that we won’t have now that the term 2 of the Flying Car Nanodegree was canceled. He asked us to email him. This week I did, and here is his reply:
I was using the following textbooks for the fixed wing material:
- Small Unmanned Aircraft: Theory and Practice by Randal W. Beard (Author), Timothy W. McLain (Author)
- Flight Dynamics by Robert F. Stengel (Author)
and for the mission planning I was planning to use:
- Operations Research for Unmanned Systems by Jeffrey R. Cares (Editor), John Q. Dickmann Jr. (Editor)
I’d also recommend:
- Decision Making Under Uncertainty: Theory and Application by Mykel J. Kochenderfer (Author, Contributor), Christopher Amato (Contributor), Girish Chowdhary (Contributor), Jonathan P. How (Contributor), Hayley J. Davison Reynolds (Contributor), Jason R. Thornton (Contributor), & 3 more
and any papers by Mykel Kochenderfer:
- H. Bai, D. Hsu, M. J. Kochenderfer, and W. S. Lee, “Unmanned aircraft collision avoidance using continuous-state POMDPs,” in Robotics: Science and Systems, 2011.
- M. J. Kochenderfer and J. P. Chryssanthacopoulos, “Robust airborne collision avoidance through dynamic programming,” Massachusetts Institute of Technology, Lincoln Laboratory, Project Report ATC-371, 2011.
Hope this helps! Nick
Thank you very much, Prof. Nick Roy, for giving us this opportunity to meet you in person and learn more about your group and your research vision. Thanks, Udacity for bringing this group together. We enjoyed the Flying Car Nanodegree. And thanks to all the participants of this visit for sharing their videos and photos.
Thanks! It was a dream comes true at least for me!