Let’s try another drone simulator! This time it is ETHzürich Autonomous Systems Lab RotorS. The simulator could be found on ETHZ-asl/rotors_simulator repo. The README.md file there is full of instructions on how to install it, but I went over a few bumps to get it running. That journey is described here.
I have ROS installed already; so, I started creating a new workspace:
mkdir -p ~/projects/Simulators/ethz-asl/src
cd ~/projects/Simulators/ethz-asl/src
catkin_init_workspace # initialize your catkin workspace
wstool init
wget https://raw.githubusercontent.com/ethz-asl/rotors_simulator/master/rotors_hil.rosinstall
wstool merge rotors_hil.rosinstall
wstool update
Then I installed python_catkin_tools.
Following the instruction: https://catkin-tools.readthedocs.io/en/latest/installing.html
sudo apt-get install python-catkin-tools
Trying to build the project I got this error:
catkin build
...
ImportError: "from catkin_pkg.package import parse_package" failed: No module named catkin_pkg.package
Make sure that you have installed "catkin_pkg", it is up to date and on the PYTHONPATH.
...
After googling it for a while, I noticed this post: https://answers.ros.org/question/126471/cmake-failed-catkin_pkg/
On the comments I saw:
Have you installed anaconda? If yes, maybe you should commet the anaconda path in .bashrc
I did have miconda installed. That works to get into another problem:
catkin build
...
from future import standard_library
ImportError: No module named future
...
Googling it again, found: https://github.com/ArduPilot/pymavlink/issues/25
I have to install the module future but I didn’t have pip installed, so:
sudo apt-get install python-pip
and then:
sudo pip install future
Notice that is not futures it is only one future what we need:
pip list | grep fut
future (0.17.1)
futures (3.0.5)
Here we go again to yet another error:
CMake Error at /opt/ros/kinetic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):
Could not find a package configuration file provided by "octomap_msgs" with
any of the following names:
octomap_msgsConfig.cmake
octomap_msgs-config.cmake
A missing package, I will try to install octomap but it was already installed:
sudo apt-get install ros-kinetic-octomap
Reading package lists... Done
Building dependency tree
Reading state information... Done
ros-kinetic-octomap is already the newest version (1.8.1-0xenial-20180809-134711-0800).
ros-kinetic-octomap set to manually installed.
0 upgraded, 0 newly installed, 0 to remove and 0 not upgraded.
I needed the messages:
sudo apt-get install ros-kinetic-octomap-msgs
Almost there:
catkin build
...
Could not find a package configuration file provided by "octomap_ros" with
any of the following names:
octomap_rosConfig.cmake
octomap_ros-config.cmake
...
Missing package octomap_ros (it was on the instructions, but I didn’t see it):
sudo apt-get install ros-kinetic-octomap-ros
This is it! Nop, another missing library:
catkin build
...
CMake Error at /usr/share/cmake-3.5/Modules/FindPackageHandleStandardArgs.cmake:148 (message):
Could NOT find GeographicLib (missing: GeographicLib_LIBRARIES
GeographicLib_INCLUDE_DIRS)
...
After googling, it found: https://github.com/mavlink/mavros/issues/848
sudo apt-get install libgeographic-dev
sudo apt-get install geographiclib-tools
Another missing library glog:
catkin build
...
Failed to find glog - Could not find glog include directory, set
GLOG_INCLUDE_DIR to directory containing glog/logging.h
...
Google is your friend (it was also in the instructions, but I miss this one too):
sudo apt install libgoogle-glog-dev
After missing two many libraries, I think it is better to re-read the instruction again. Re-reading the initial documentation, I found I forgot to install a couple of packages:
sudo apt-get install protobuf-compiler ros-kinetic-mavlink
But still no joy. The installation continues and took a while building and running tests but still have a compilation error this time:
rotors_hil_interface/hil_interface.h:105:3: error: ‘mavlink_hil_gps_t’ does not name a type
mavlink_hil_gps_t hil_gps_msg_;
Googling I found this issue https://github.com/ethz-asl/rotors_simulator/issues/356
Based on that, I need to ignore the rotors_hil_interface for now:
touch src/rotors_simulator/rotors_hil_interface/CATKIN_IGNORE
This time everything works:
catkin build
...
[build] Summary: All 16 packages succeeded!
[build] Ignored: 2 packages were skipped or are blacklisted.
[build] Warnings: None.
[build] Abandoned: None.
[build] Failed: None.
[build] Runtime: 7.2 seconds total.
There is no warning here, but if we clean (catkin clean) and then build again you can see a couple of warnings.
[build] Summary: All 17 packages succeeded!
[build] Ignored: 2 packages were skipped or are blacklisted.
[build] Warnings: 3 packages succeeded with warnings.
[build] Abandoned: None.
[build] Failed: None.
[build] Runtime: 4 minutes and 32.2 seconds total.
[build] Note: Workspace packages have changed, please re-source setup files to use them.
The packages with warnings were:
- mavlink
- rotors_control
- rotors_gazebo_plugins
Everything should be fine! Let’s try to run it:
roslaunch rotors_gazebo mav_hovering_example.launch mav_name:=firefly world_name:=basic
Gazebo starts and the drone hovers:
That is a good start! To get more info rosrun rqt_graph rqt_graph:
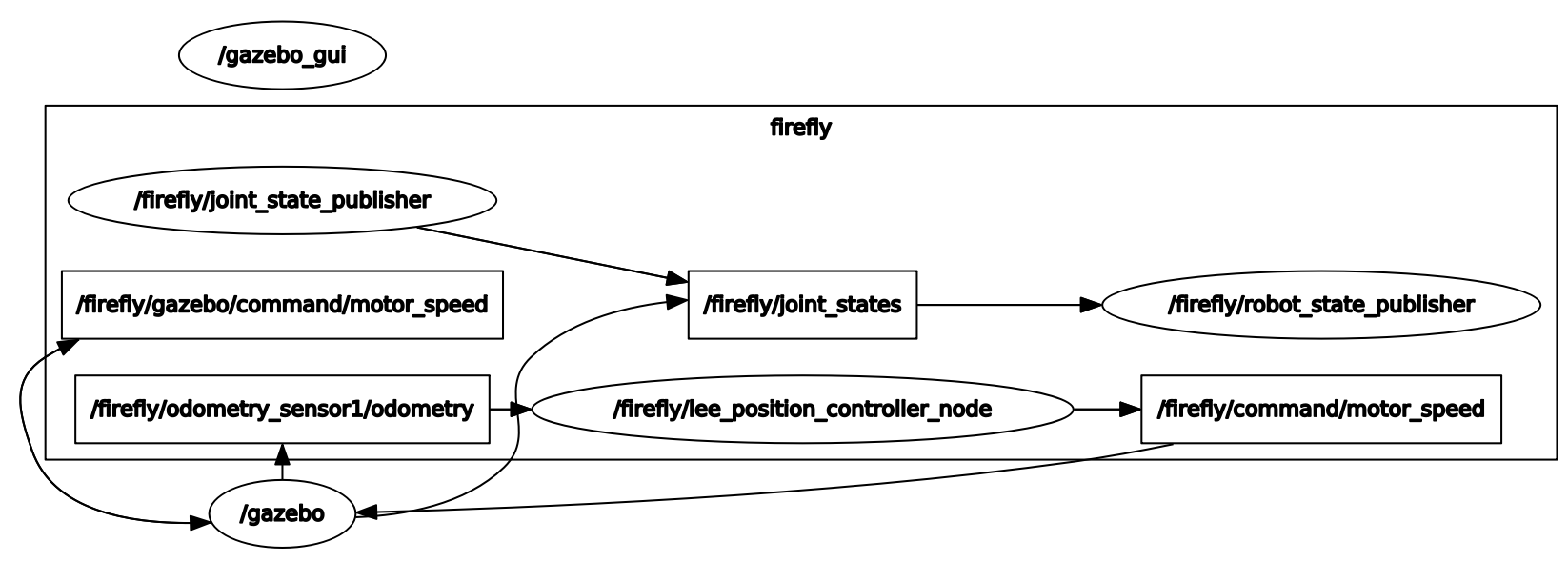
The documentation specifies the topic /firefly/command/motor_speed to receive mav_msgs/Actuators messages to command the rotors angular velocity.
The installation was a long journey, but not so hard to have RotorS running. It is time for new adventures!
Happy droning!