CarND-Extended-Kalman-Filter-P1
Udacity Self-Driving Car Nanodegree - Extended Kalman Filter Implementation
Overview
This project consists of implementing an Extended Kalman Filter with C++. A simulator provided by Udacity (it could be downloaded here) generates noisy RADAR and LIDAR measurements of the position and velocity of an object, and the Extended Kalman Filter[EKF] must fusion those measurements to predict the position of the object. The communication between the simulator and the EKF is done using WebSocket using the uWebSockets implementation on the EKF side. To get this project started, Udacity provides a seed project that could be found (here)(https://github.com/udacity/CarND-Extended-Kalman-Filter-Project).
Prerequisites
The project has the following dependencies (from Udacity’s seed project):
- cmake >= 3.5
- make >= 4.1
- gcc/g++ >= 5.4
- Udacity’s simulator.
For instructions on how to install these components on different operating systems, please, visit Udacity’s seed project. As this particular implementation was done on Mac OS, the rest of this documentation will be focused on Mac OS. I am sorry to be that restrictive.
In order to install the necessary libraries, use the install-mac.sh.
Compiling and executing the project
These are the suggested steps:
- Clone the repo and cd to it on a Terminal.
- Create the build directory:
mkdir build cd buildcmake ..make: This will create two executablesExtendedKF: EKF implementation.Test: Simple unit tests using Catch.
Running the tests
From the build directory, execute ./Tests. The output should be something similar to this:
ERROR - CalculateRMSE () - The estimations vector is empty
ERROR - CalculateRMSE () - The ground-truth vector is empty
ERROR - CalculateRMSE () - The ground-truth and estimations vectors must have the same size.
ERROR - CalculateJacobian () - The state vector must have size 4.
ERROR - CalculateJacobian () - Division by Zero
===============================================================================
All tests passed (13 assertions in 2 test cases)
These unit tests were an experiment with Catch. It looks like a good and simple unit testing framework for C++.
Running the Filter
From the build directory, execute ./ExtendedKF. The output should be:
Listening to port 4567
Connected!!!
As you can see, the simulator connect to it right away.
The following is an image of the simulator:
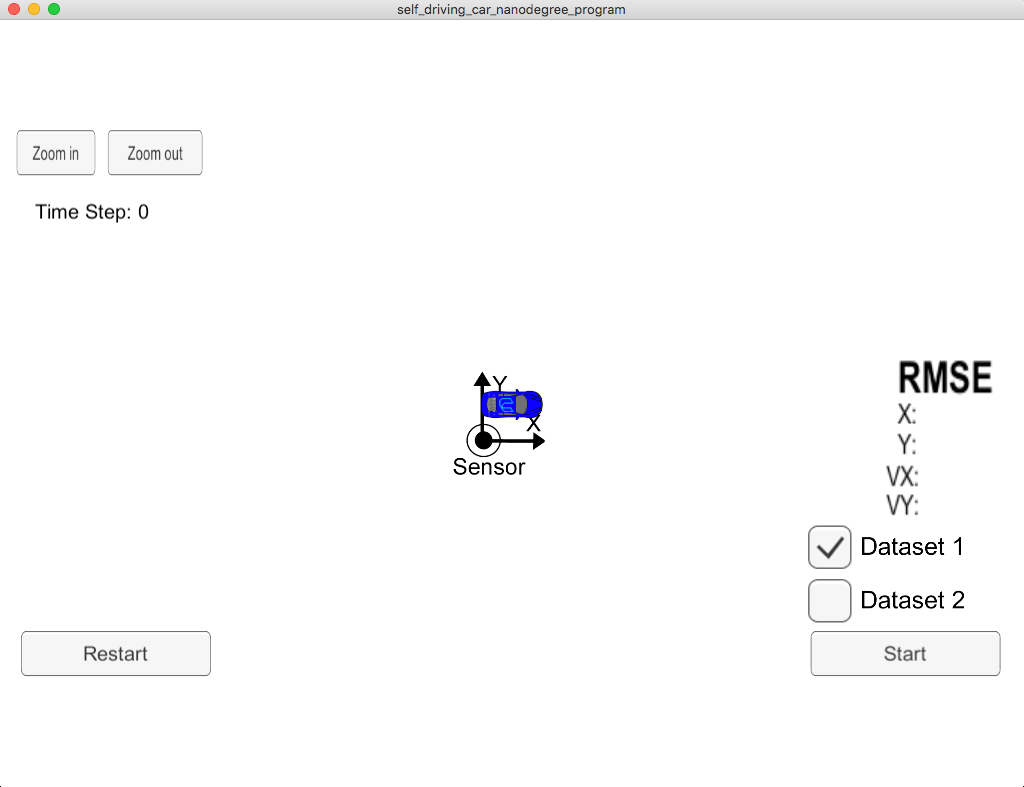
The simulator provides two datasets. The difference between them are:
- The direction the car (the object) is moving.
- The order the first measurement is sent to the EKF. On dataset 1, the LIDAR measurement is sent first. On the dataset 2, the RADAR measurement is sent first.
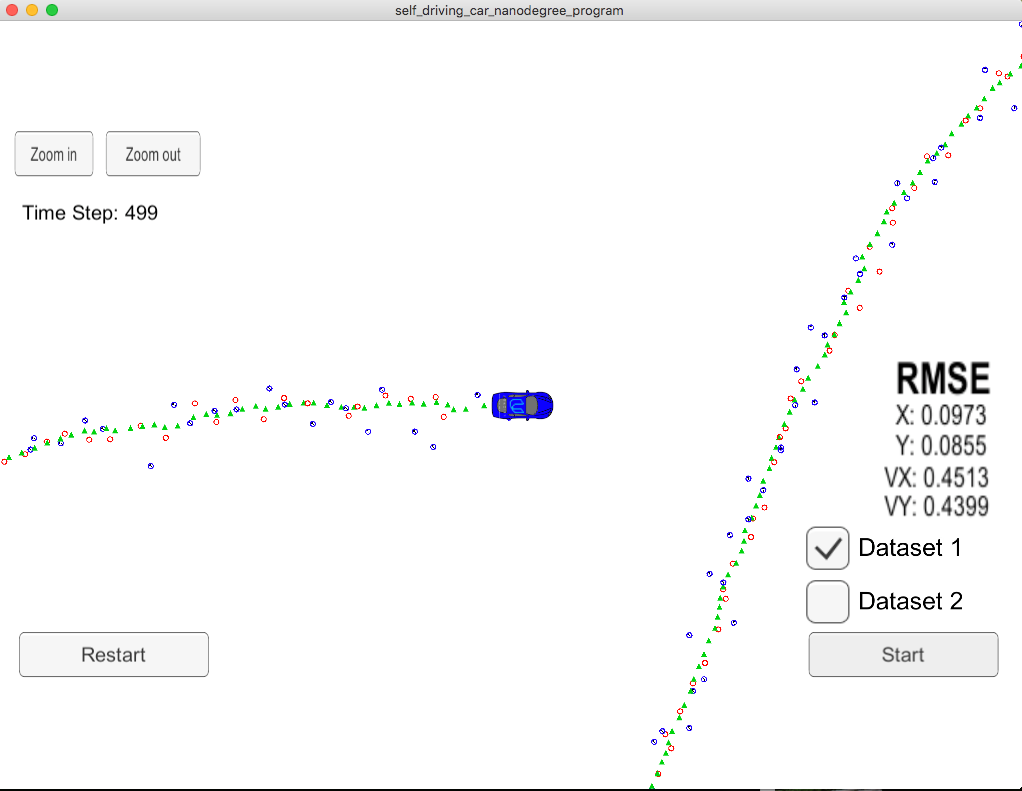
Here is the simulator final state after running the EKL with dataset 1:
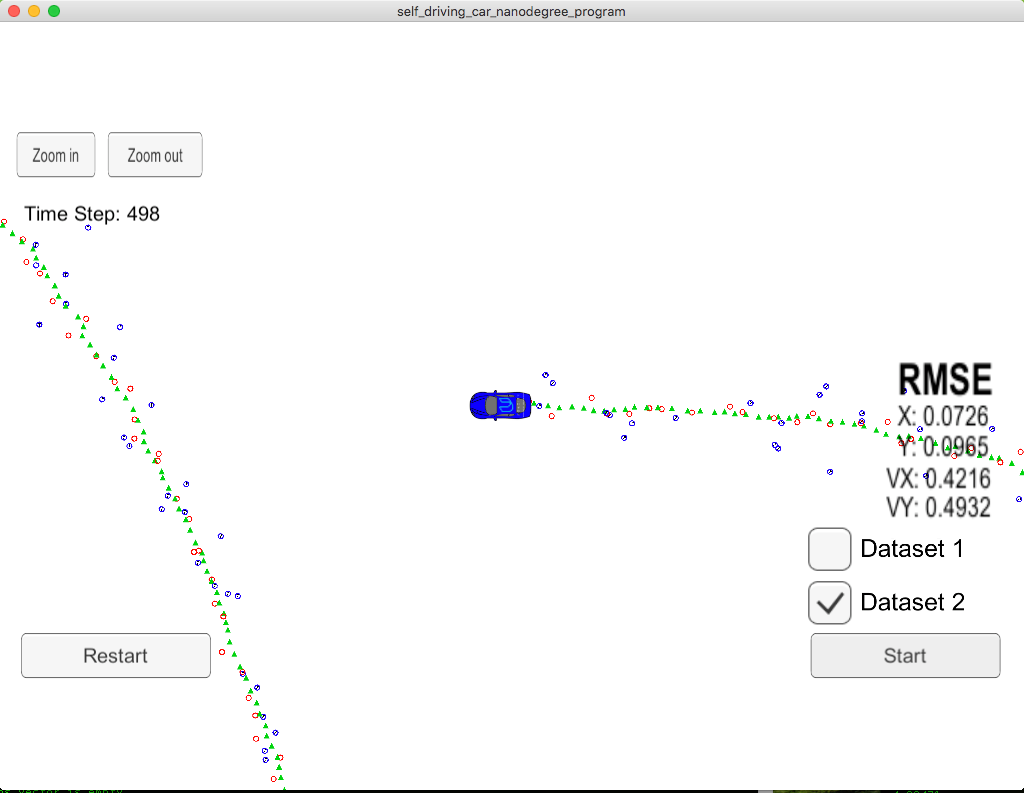
Here is the simulator final state after running the EKL with dataset 2:
Rubric points
Compiling
Your code should compile
The code compiles without errors. I did change the CMackeLists.txt to add the creation of the ./Tests. I don’t think this will create incompatibilities with other platforms, but I only test it on Mac OS.
Accuracy
px, py, vx, vy output coordinates must have an RMSE <= [.11, .11, 0.52, 0.52] when using the file: “obj_pose-laser-radar-synthetic-input.txt which is the same data file the simulator uses for Dataset 1”
The EKF accuracy was:
- Dataset 1 : RMSE <= [0.0973, 0.0855, 0.4513, 0.4399]
- Dataset 2 : RMSE <= [0.0726, 0.0965, 0.4216, 0.4932]
Following the Correct Algorithm
Your Sensor Fusion algorithm follows the general processing flow as taught in the preceding lessons.
The Kalman filter implementation can be found src/kalman_filter.cpp and it is used to predict at src/FusionEKF.cpp line 147 and to update line 159 to 169.
Your Kalman Filter algorithm handles the first measurements appropriately.
The first measurement is handled at src/FusionEKF.cpp from line 61 to line 107.
Your Kalman Filter algorithm first predicts then updates.
The predict operation could be found at src/FusionEKF.cpp line 147 and the update operation from line 159 to 169 of the same file.
Your Kalman Filter can handle radar and lidar measurements.
Different type of measurements are handled in two places in src/FusionEKF.cpp:
- For the first measurement from line 61 to line 107.
- For the update part from line 159 to 169.
Code Efficiency
Your algorithm should avoid unnecessary calculations.
An example of this calculation optimization is when the Q matrix is calculated src/FusionEKF.cpp line 135 to line 144.